ENSO Seminar Series


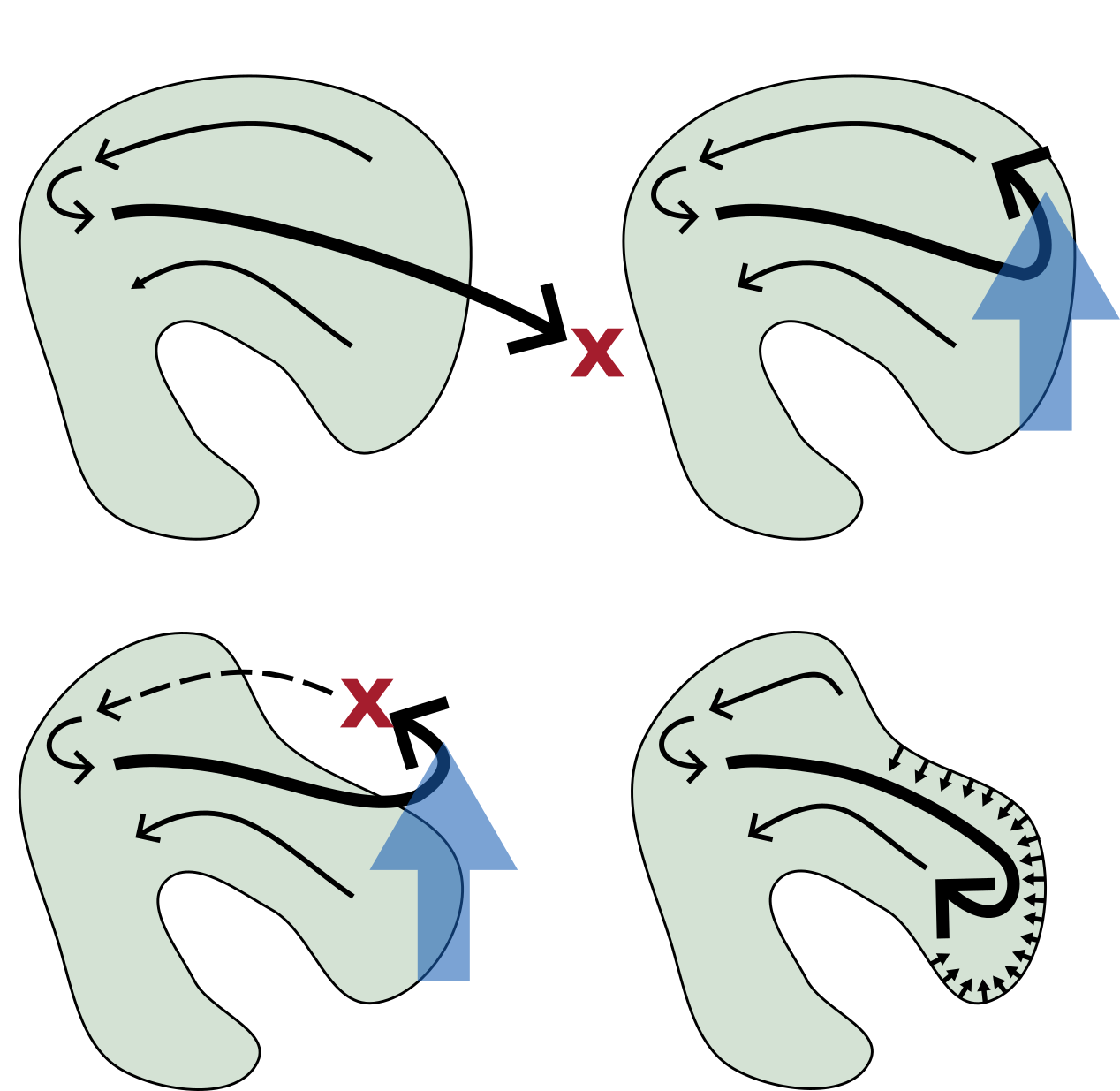
The IDSM (Egbert & Barandiaran, 2014) is a model that was designed to investigate sensorimotor-autonomy. The IDSM produces autonomous sensorimotor habits, but the habits it produces are not particularly robust or adaptive (Egbert, 2018).
These observations have motivated me to develop a new model. The purpose of the model is to demonstrate a strong notion of adaptive autonomy in the sensorimotor domain. That is to say: I want the model to show how a pattern of sensorimotor behaviour might be both:
In my talk I will introduce my work-in-progress model. If possible I would love for the ensuing discussion to focus on the goal I stated above and what different people believe would be required to adequately demonstrate adaptive autonomy in the sensorimotor domain.
Egbert M. D., Barandiaran X. E. (2014) Modeling habits as self-sustaining patterns of sensorimotor behavior Frontiers in Human Neuroscience, 8, 590.
Egbert M. D. (2018) Investigations of an Adaptive and Autonomous Sensorimotor Individual The 2018 Conference on Artificial Life: A Hybrid of the European Conference on Artificial Life (ECAL) and the International Conference on the Synthesis and Simulation of Living Systems (ALIFE), 343-350
Link to join/watch the seminar: https://youtube.com/live/HPUcWz7PVcM?feature=share
Modeling habits as self-sustaining patterns of sensorimotor behavior (Egbert M. D., Barandiaran X. E.)
Investigations of an Adaptive and Autonomous Sensorimotor Individual (Egbert M. D.)